丂偙偙偱偼悈暯曽岦偺敪幩偵尷掕偟偰丄恖岺塹惎偺婳摴偺棟榑幃傪帵偡偲偲傕偵"iEarth Satellite"偺夵椙斉傪徯夘偟傑偡丅夵椙斉偱偼悢抣寁嶼偵傛傞婳愓偵壛偊偰丄棟榑婳摴傕昞帵偝傟傑偡丅
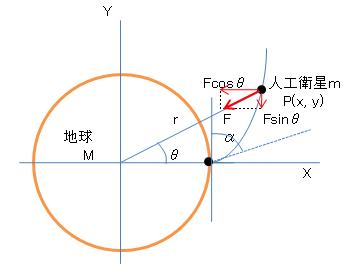
嵍恾偱丄懪忋偘妏兛=0搙偺悈暯曽岦敪幩偺応崌傪峫偊傑偡丅
偨偩偟丄搑拞傑偱偺寁嶼幃偼擟堄偺敪幩曽岦偵揔梡偱偒傑偡丅
恖岺塹惎偺婳摴偺棟榑幃偺摫弌枛旜偺僔儈儏儗乕僔儑儞僾儘僌儔儉偱妋擣偟偰偔偩偝偄丅
丒恖岺塹惎偺婳摴偵娭偡傞塣摦曽掱幃乮俀奒偺旝暘曽掱幃乯丗 丂丂x"亖丂-GMx/r3 丂丂y"亖丂-GMy/r3 丂丂偙偙偱丄 丂丂丂G丂丗丂枩桳堷椡掕悢 丂丂丂M丂丗丂抧媴偺幙検 丂丂丂r丂丗丂抧媴偺拞怱偲恖岺塹惎偺嫍棧丄r2 = x2 + y2 丂傪弶婜忦審乵帪崗t=0 偱 x=r0, y=0, 懍搙v=v0乶偱夝偒傑偡丅 丒捈岎嵗昗宯偱昞尰偝傟偨偙傟傜偺幃傪嬌嵗昗宯(r,兤)偵曄姺偟傑偡丅椉幰偺娭學 丂丂x = rcos兤 丂丂y = rsin兤 丂傛傝丄 丂丂x' = r'cos兤 - rsin兤兤' x" = r"cos兤 - 2r'sin兤兤' -rcos兤(兤')2 - rsin兤兤" 丂丂y' = r'sin兤 + rcos兤兤' y" = r"sin兤 + 2r'cos兤兤' -rsin兤(兤')2 + rcos兤兤" 丒壛懍搙偺摦宎乮倰乯曽岦惉暘丗Ar 丂丂Ar = x"cos兤 + y"sin兤 丂丂丂 = r" - r(兤')2 丂壛懍搙偺曽埵妏乮兤乯曽岦惉暘丗A兤 A兤 = -x"sin兤 + y"cos兤 丂丂丂丂= 2r'兤' + r兤" = (r2兤')'/r 丒椡偺摦宎乮倰乯曽岦惉暘丗Fr = -GMm/r2 丂椡偺曽埵妏乮兤乯曽岦惉暘丗F兤 = 0 丒廬偭偰丄嬌嵗昗宯偱偺塣摦曽掱幃偼 丂丂r" - r(兤')2 = -GM/r2丂丒丒丒(幃侾乯 (r2兤')'/r = 0 丂屻幰偺幃傛傝 丂丂r2兤' = c1 (c1: 愊暘掕悢乯 丂丂mr2兤' = mc1 丂嵍曈偼妏塣摦検(mrv)偱偁傝丄偙傟偑堦掕偱偁傞偙偲偐傜 t=0 偱偺弶婜抣 r = r0, v = v0 傪戙擖偟偰 丂乮偙傟埲崀偼懪忋偘妏搙兛=0搙偺悈暯曽岦敪幩偺応崌偵尷掕乯 丂 mr2兤' = mr0v0 丂 r2兤' = r0v0丂丒丒丒(幃俀乯 丒(幃俀乯偺兤'傪(幃侾乯偵戙擖偡傞偲丄摦宎倰曽岦偺俀奒偺旝暘曽掱幃偑摼傜傟傑偡丅 丂丂r" -(r0v0)2/r3 + GM/r2 = 0 丒曄悢偺抲姺 u = 1/r 傪峴側偄丄惍棟偡傞偲乮搑拞偺夁掱偼徣棯乯 丂丂d2u/d兤2 + u = 1/L 偙偙偱丄L = (r0v0)2/(GM) 丒偙偺夝偼 丂丂u = 1/r = Acos(兤+兝) + 1/L (A, 兝: 愊暘掕悢乯 兤偑0偺偲偒倰偑嵟彫乮u 偑嵟戝乯偲側傞傛偆偵妏搙傪愝掕偡傟偽兝亖0偲側傞偐傜 丂丂u = 1/r = Acos(兤) + 1/L 丂丂r = L / (1 + 兠cos兤乯 丂丂偙偙偱丄 兠=AL丂丗棧怱棪 丒t=0偱 兤=0, r=r0 偲偡傞偲 丂丂r0 = L / (1 + 兠) --> 兠 = L/r0 - 1 偲側傝丄寢嬊乮懪忋偘妏0搙丄偡側傢偪悈暯曽岦偵敪幩偝傟傞乯恖岺塹惎偺婳摴曽掱幃偼 丂丂r = L / (1 + 兠cos兤乯丂丂丂丒丒丒(幃俁乯 丂丂丂偙偙偱丄兠 = L/r0 - 1 丂丂丂丂丂丂丂L丂= (r0v0)2/(GM) 偲側傝傑偡丅偙偺幃偼嬌嵗昗偱偺墌悕嬋慄乮擇師嬋慄乯傪昞偟偰偄傑偡丅